Introducing the latest advancements and innovations within the euROBIN network, our leader of the Work Package Know (WP Know) offers insights into the developments and novel approaches shaping the future of knowledge representation and simulation capabilities. Read on to discover the forefront of technological progress in robotics and related domains.
"As the leader of WP Know, our mission is enhancing the knowledge representation and reasoning capabilities within the euROBIN network. Our primary objectives include providing, integrating, and advancing knowledge models related to robots, objects, tasks, and environments through our web-based knowledge service known as openEASE.
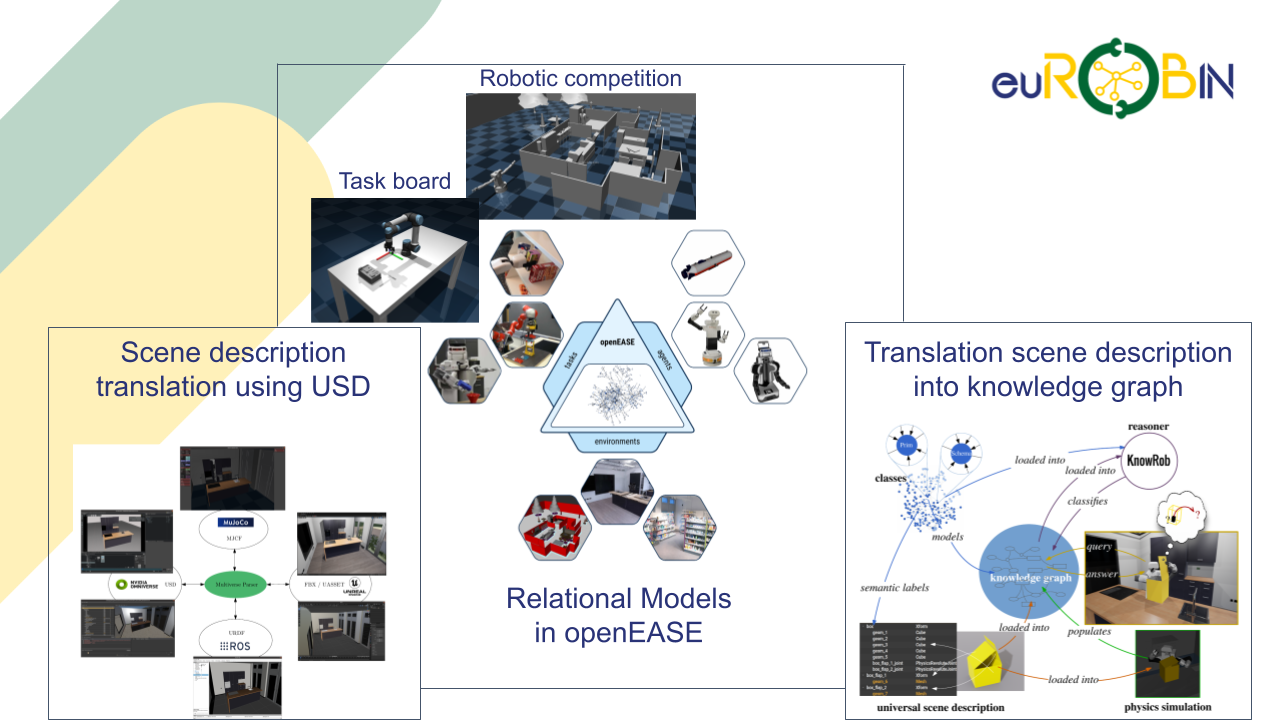
To facilitate visualization, logging, and verification of knowledge across diverse application domains, we are actively developing a simulation framework. This versatile framework has the capability to combine various physics and graphics engines. It serves as the abstract layer for simulation, enabling us to comprehensively understand and replicate the real-world scenarios it simulates.
Our framework plays a pivotal role in generating and applying knowledge bases in domains such as robotic manufacturing and household robotics. In particular, we're currently collaborating with TUM to develop a digital twin for the task board including the robotic agent with the ROS2 interface, mirroring real-world functionality. Additionally, our digital twin is being tailored for use in virtual robotic competitions, where we are collaborating with IST to organize such events in Nancy.
Our ultimate vision is to provide a web-based application that empowers users to select various environments, robots, and task implementations. To address the challenge of multiple description formats for environments and robots, such as URDF for ROS, MJCF for MuJoCo, and SDF for Gazebo, we are developing a parser. This parser can seamlessly convert scene descriptions between formats using USD (Universal Scene Description) as the translation medium, which is an industry-standard, open-source format developed by Pixar for describing and exchanging 3D scenes and assets. One of USD's unique features is its extensibility through schema API, making it highly adaptable for the translation process.
Our parser simplifies the conversion process, optimizing and standardizing scene descriptions into USD or other formats. Once simulation models are uploaded and converted into USD, we can effortlessly translate the scene graph into a knowledge graph. This transition includes model classification and relationships. In runtime, the simulation or the real system populates the knowledge graph by updating the current state, inclusive of joint states, positions, velocities, and more.
As a result, the robotic agent can then query the knowledge base, which is accessible in EuroCore, draw inferences from a reasoner, and obtain answers."