From Tuesday 25 to Thursday 27 March, the European Robotics Forum (ERF) was held in Stuttgart, Germany, a very important event for robotics and artificial intelligence in Europe, boosting industry and research in the sector.
A place where the best experts have gathered, which have been seen in interesting workshops where knowledge has been exchanged and new contacts have been created.
euROBIN Project was there and had the honour of sharing knowledge as panelists in workshops with top experts.
We share a summary of what these days have been like for euROBIN Project at the European Robotics Forum (ERF), not forgetting that euROBIN project was also present at the stand of Fraunhofer IPA, one of our partners and organisers of the ERF, during the whole event.
First day of the ERF - Tuesday 25 March 2025
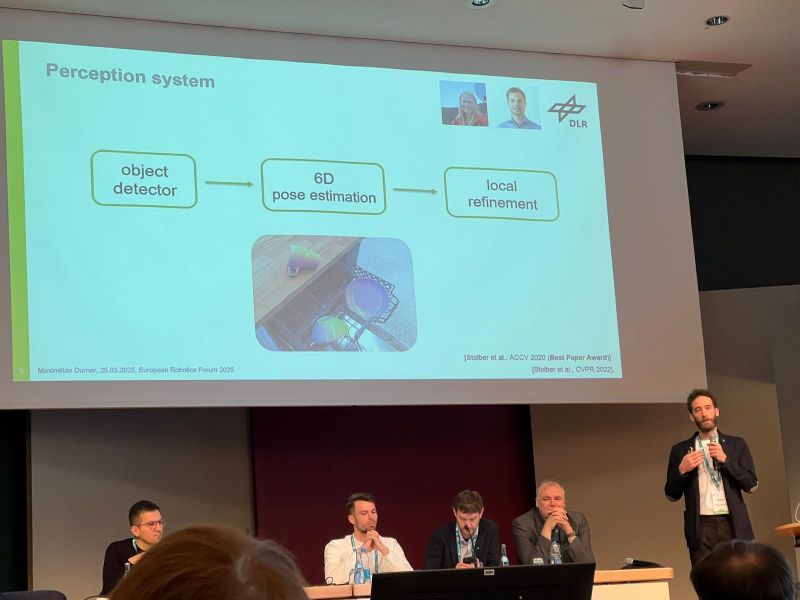
- First euROBIN workshop at the start of the day: 8:30 am ‘Insights into pose estimation and grasp prediction of an unknown object’.
With the participation of Rudolph Triebel , Leader of the Perception and Cognition Department at the Institute of Robotics of the German Aerospace Center (DLR) and Professor of Perception of Intelligent Robots at Karlsruhe Institute of Technology (KIT) and also with Maximilian Durner, Research Group Leader at the Perception and Cognition Department at the Institute of Robotics and Mechatronics (RMC) of the German Aerospace Center (DLR).
- At 2 pm, euROBIN participated in the workshop 'Scientific Track AI for Robotics', whose presenter was Ahmed Abdelrahman from the Technical University of Munich, who spoke about ‘Task-oriented Visual Object Pose Estimation for Robot Manipulation: A Modular Approach’.
Other speakers at this interesting workshop included Peter So, MBA, representing the Munich Institute for Robotics and Artificial Intelligence (MIRMI) at the Technical University of Munich and Hoan Le, also representing the Munich Institute for Robotics and Artificial Intelligence (MIRMI) at the Technical University of Munich, Germany.

- To end the day, the last workshop in which we participated was a great success, as it could not be otherwise with the level of the panellists.
It was at 16:00: 'Test before Invest! Reproducibility, Benchmarking and Competitions as enablers of technology transfer'.
The presenter of the euROBIN project was Pedro Lima, President of the Institute For Systems and Robotics (ISR- Lisbon), in a speech with the title: 'Introduction to Competitions: An applied example from the euROBIN project in Nancy'.
Next, our colleague Peter So, MBA (from Technical University of Munich ), had a really interesting talk with the title: 'Promotion of real-world benchmarks with the euROBIN electronic task board in the manipulation skills versatility challenge in IROS 2024, a preview of the Robothon grand challenge in automatica 2025'.
And finally, Simeon Tsvetanov, from High Performance Creators: presented his work with the euROBIN test board from Technical University of Munich and Jaime Martin FROM eProsima presented: 'Extending the euROBIN Electronic Task Board to the ROS Ecosystem. Middleware as a connector'.
So much level and so much knowledge could not end better: an interesting dialogue between participants and attendees in which different points of view have been exchanged, from which we have also learned a lot.



Second day of the ERF - Wednesday 26 March 2025
- At 11:10 am, the first euROBIN workshop was: ‘Mobile Manipulation of rigid and deformable objects: Community Challenges and Opportunities'
With the participation of some representatives of our partners, all of them great experts in the field who have provided us with a lot of interesting information.
- Francesco Ferro , from PAL Robotics (Spain)
- Enrico Mingo, from Inria, France
- Stéphane Doncieux , from Sorbonne Université and PILLAR-Robots, France
- Maximo Roa, from German Aerospace Center (DLR), Germany
- Radhika Gudipati , from Advanced Research Inventions Agency (ARIA), United Kingdom
In addition, other colleagues from the euROBIN project moderated the panel:
- Marco Rosa, from PAL Robotics, Spain.
- Ashok Meenakshi Sundaram - German Aerospace Center (DLR), Germany
- Florian Pokorny - Royal Institute of Technology KTH, Sweden

- In the afternoon, the second workshop focused on: 'The future of robotics in Europe - Is there a common strategy?, with Alin Albu-Schaeffer, our Coordinator in the euROBIN project, who shared interesting insights on the future of robotics in Europe.
We also had the interesting interventions of:
Petra Koudelková Delimoges, European consultant in robotics and artificial intelligence.
Patrick Schwarzkopf, from VDMA
Cecile Huet, Head of Unit for Innovation and Excellence in Robotics and Artificial Intelligence, European Commission
Stefan Mengel, Head of Division Federal Ministry of Education and Research, Germany
A very high-level workshop, moderated by David Bisset, Executive Director of euRobotics aisbl.

Third and final day of the ERF - Thursday 27 March 2025
- Our last workshop: ‘Advancing AI-Powered Robotic Cognition, Deliberation and Learning for Real-World Applications’.
It has had the interesting intervention of Prof. Dr. Michael Beetz, Director of the Artificial Intelligence Institute of the University of Bremen (AICOR) and also of Rudolf Triebel, Leader of the Department of Perception and Cognition at the Institute of Robotics of the German Aerospace Center (DLR) and Professor of Perception of Intelligent Robots at Karlsruhe Institute of Technology (KIT), who have spoken about ‘Cognition-Enable Transferable Embodied AI’.
Undoubtedly, it has been a very fruitful few days in which it has been possible to debate and talk about the European strategy in robotics and artificial intelligence thanks to the best experts, with more than 1 500 participants from 40 countries and with a clear answer: robotics is essential in Europe to help face the great challenges ahead. And euROBIN is fundamental to be part of it.
Thank you to all those who have participated in the EFR these days and those who have attended.
More information: here

From Tuesday 25 to Thursday 27 March 2025, euROBIN will be at the European Robotics Forum (ERF) in Stuttgart, Germany.
This is one of the most influential events in Europe in both robotics and artificial intelligence, which will also count with our partner Fraunhofer IPA as one of the organisers.
Below, we explain euROBIN's participation during the ERF, in different workshops with euROBIN partners:
Tuesday 25 March 2025
- 14:00 - 15:20- Workshop Scientific Track AI for Robotics.
- Where - Maritim.
- With Michael Beetz, Director Institute of Artificial Intelligence at Universitaet Bremen.
***
- 16:00 - 17:20h- Workshop Test before Invest! Reproducibility, Benchmarking and Competitions as enablers of technology transfer.
- Where - Room 14-16.
- With Pedro U. Lima (Institute for Systems and Robotics (ISR | Lisboa), University of Lisbon), Daniel Bargmann (Fraunhofer IPA), Peter So (Technical University of Munich- TUM) and Mikkel Olsen (Danish Technological Institute -DTI).
Wednesday 26 March 2025
- 11:10 - 12:30h - Workshop Mobile Manipulation of rigid and deformable objects: Community
- Where - Room 22-24
- With Francesco Ferro from PAL Robotics (Spain), Enrico Mingo from INRIA (France) and Stephane Doncieux, from Sorbonne University & PILLAR-Robots (France).
***
- 14:00 - 15:20h - Workshop The Future of Robotics in Europe - Is there a common strategy?
- Where - Silchersaal
- With Alin Albu-Schäffer, euROBIN Project Coordinator and Aude Billard, euROBIN Scientific Manager.
Thursday 27 March 2025
- 08:30 - 09:50h- Workshop Towards next generation robotics: Generative AI use cases, challenges and opportunities
- Where - Silchersaal
- Talk about Challenges in GenAI for Robotics with Bruno Siciliano, Uni Naples, Italy
****
- 14:00 - 15:20h - Workshop Advancing AI-Powered Robotic Cognition, Deliberation and Learning for Real-World Applications
- Where - Silchersaal
- With Michael Beetz, Director Institute of Artificial Intelligence at Universitaet Bremen and Rudolf Triebel, DLR, Germany)
All information about the event can be found here.
The euROBIN project continues to make progress and our euROBIN Strategic Research Agenda (SRA) is now ready.
Robotics has made remarkable advances over the last two decades, progressively extending its scope beyond industrial automation.
The continuing advance of these research trends in this field is now converging with the rapid evolution of artificial intelligence techniques, and we have created a roadmap to address the continuing advance of both AI and embodied robotics, i.e. artificial intelligence embedded in physical bodies interacting with the environment, with other intelligent agents and with humans; its research, the challenges it faces and what is actually needed for its deployment in line with the European goals of sustainability, equity and economic growth.
This euROBIN project document includes our proposed Strategic Agenda for Robotics in Europe, an analysis of the problems solved and the challenges remaining, as well as the successes, obstacles and remaining challenges in both robotics and AI.
The document has been prepared by leading experts in the field from across the EU and with the collaboration of many others who have contributed their vision to make euROBIN's SRA a key building block to position Europe as a world leader in technological and ethical, impactful and sustainable innovation.
We would like to thank especially Aude Billiard, our euROBIN Scientific Director and the whole EPFL team for their work, also Antonio Bicchi (Italian Institute of Technology), Tamim Asfour (Karlsruhe Institute of Technology, Germany), Bram Vanderborght (Vrije Universiteit Brussel and Imec, Belgium), Danica Kragic (School of Computer Science and Communication, Royal Institute of Technology, Sweden), Loredana Zollo (Director of the PhD program in Bioengineering, Università Campus Bio-Medico di Roma), Bruno Siciliano (Università di Napoli Federico II, Italy), Serena Ivaldi (Inria), Rebecca Schedl-Warpup (euROBIN project Coordinator and German Aerospace Center (DLR)), Pedro Lima (Institute for Systems and Robotics (ISR-Lisboa), Juan Antonio Pavón Losada (euROBIN Proyect communicatio lead) and the euROBIN team involved.
Thank you very much all those who have participated with their valuable contributions!
You can read and download the full document here.